实现 SV39 多级页表机制(上)
本节导读
在上一小节中我们已经简单介绍了分页的内存管理策略,现在我们尝试在 RV64 架构提供的 SV39 分页机制的基础上完成内核中的软件对应实现。由于内容过多,我们将分成两个小节进行讲解。本节主要讲解在RV64架构下的虚拟地址与物理地址的访问属性(可读,可写,可执行等),组成结构(页号,帧号,偏移量等),访问的空间范围等;以及如何用Rust语言来设计有类型的页表项。
虚拟地址和物理地址
内存控制相关的CSR寄存器
默认情况下 MMU 未被使能,此时无论 CPU 位于哪个特权级,访存的地址都会作为一个物理地址交给对应的内存控制单元来直接 访问物理内存。我们可以通过修改 S 特权级的一个名为 satp 的 CSR 来启用分页模式,在这之后 S 和 U 特权级的访存 地址会被视为一个虚拟地址,它需要经过 MMU 的地址转换变为一个物理地址,再通过它来访问物理内存;而 M 特权级的访存地址,我们可设定是内存的物理地址。
注解
M 特权级的访存地址被视为一个物理地址还是一个需要经历和 S/U 特权级相同的地址转换的虚拟地址取决于硬件配置,在这里我们不会进一步探讨。

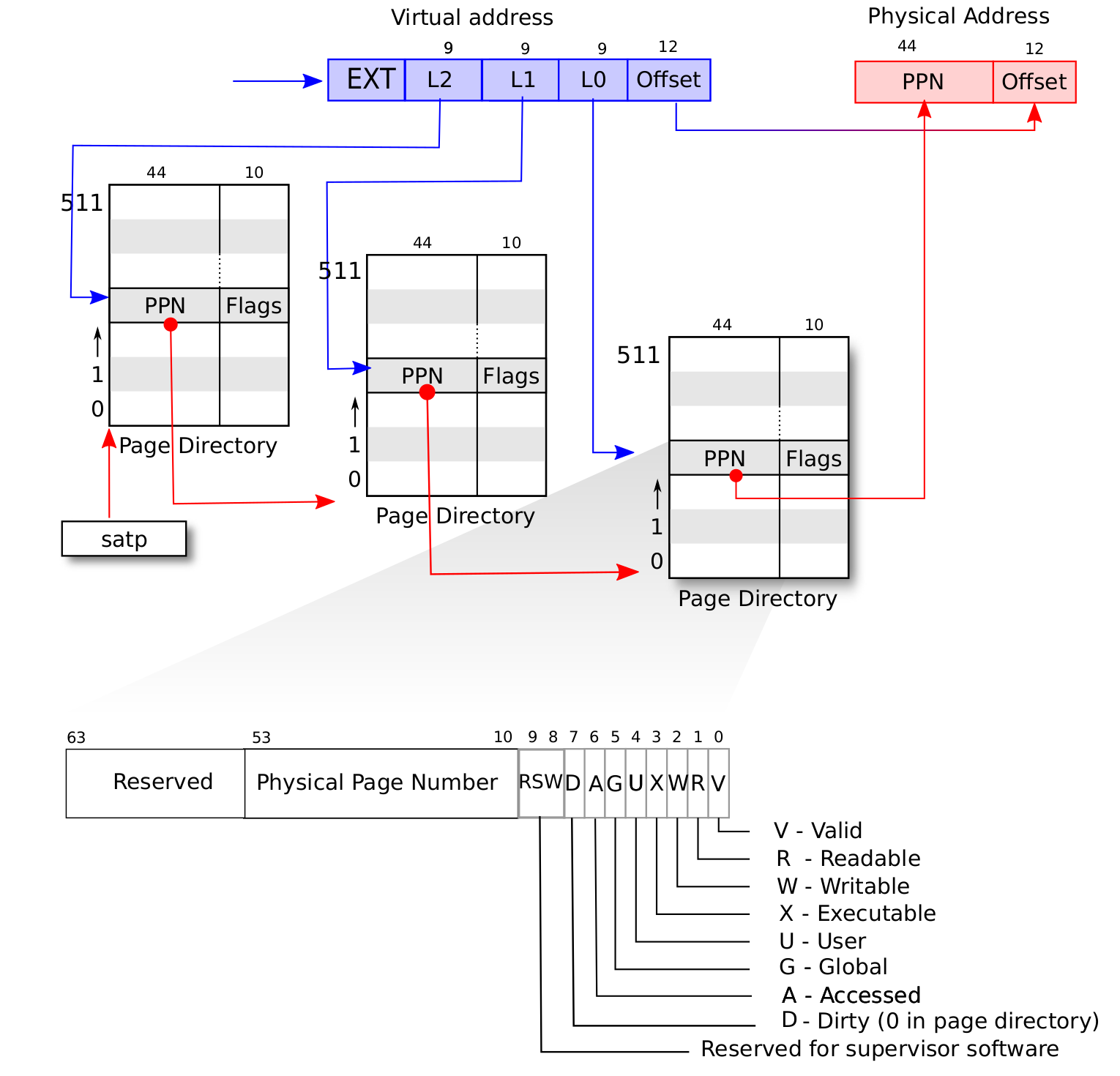
上图是 RV64 架构下 satp 的字段分布。当 MODE 设置为 0 的时候,代表所有访存都被视为物理地址;而设置为 8 的时候,SV39 分页机制被启用,所有 S/U 特权级的访存被视为一个 39 位的虚拟地址,它们需要先经过 MMU 的地址转换流程, 如果顺利的话,则会变成一个 56 位的物理地址来访问物理内存;否则则会触发异常,这体现了该机制的内存保护能力。
虚拟地址和物理地址都是字节地址,39 位的虚拟地址可以用来访问理论上最大 \(512\text{GiB}\) 的地址空间, 而 56 位的物理地址在理论上甚至可以访问一块大小比这个地址空间的还高出几个数量级的物理内存。但是实际上无论是 虚拟地址还是物理地址,真正有意义、能够通过 MMU 的地址转换或是 CPU 内存控制单元的检查的地址仅占其中的很小 一部分,因此它们的理论容量上限在目前都没有实际意义。
地址格式与组成
我们采用分页管理,单个页面的大小设置为 \(4\text{KiB}\) ,每个虚拟页面和物理页帧都对齐到这个页面大小,也就是说 虚拟/物理地址区间 \([0,4\text{KiB})\) 为第 \(0\) 个虚拟页面/物理页帧,而 \([4\text{KiB},8\text{KiB})\) 为第 \(1\) 个,以此类推。 \(4\text{KiB}\) 需要用 12 位字节地址 来表示,因此虚拟地址和物理地址都被分成两部分:它们的低 12 位,即 \([11:0]\) 被称为 页内偏移 (Page Offset) ,它描述一个地址指向的字节在它所在页面中的相对位置。而虚拟地址的高 27 位,即 \([38:12]\) 为 它的虚拟页号 VPN,同理物理地址的高 44 位,即 \([55:12]\) 为它的物理页号 PPN,页号可以用来定位一个虚拟/物理地址 属于哪一个虚拟页面/物理页帧。
地址转换是以页为单位进行的,在地址转换的前后地址的页内偏移部分不变。可以认为 MMU 只是从虚拟地址中取出 27 位虚拟页号, 在页表中查到其对应的物理页号(如果存在的话),最后将得到的44位的物理页号与虚拟地址的12位页内偏移依序拼接到一起就变成了56位的物理地址。
注解
RV64 架构中虚拟地址为何只有 39 位?
在 64 位架构上虚拟地址长度确实应该和位宽一致为 64 位,但是在启用 SV39 分页模式下,只有低 39 位是真正有意义的。 SV39 分页模式规定 64 位虚拟地址的 \([63:39]\) 这 25 位必须和第 38 位相同,否则 MMU 会直接认定它是一个 不合法的虚拟地址。通过这个检查之后 MMU 再取出低 39 位尝试将其转化为一个 56 位的物理地址。
也就是说,所有 \(2^{64}\) 个虚拟地址中,只有最低的 \(256\text{GiB}\) (当第 38 位为 0 时) 以及最高的 \(256\text{GiB}\) (当第 38 位为 1 时)是可能通过 MMU 检查的。当我们写软件代码的时候,一个 地址的位宽毋庸置疑就是 64 位,我们要清楚可用的只有最高和最低这两部分,尽管它们已经巨大的超乎想象了;而本节中 我们专注于介绍 MMU 的机制,强调 MMU 看到的真正用来地址转换的虚拟地址只有 39 位。
地址相关的数据结构抽象与类型定义
正如本章第一小节所说,在分页内存管理中,地址转换的核心任务在于如何维护虚拟页号到物理页号的映射——也就是页表。不过在具体 实现它之前,我们先将地址和页号的概念抽象为 Rust 中的类型,借助 Rust 的类型安全特性来确保它们被正确实现。
首先是这些类型的定义:
// os/src/mm/address.rs#[derive(Copy, Clone, Ord, PartialOrd, Eq, PartialEq)]pub struct PhysAddr(pub usize);#[derive(Copy, Clone, Ord, PartialOrd, Eq, PartialEq)]pub struct VirtAddr(pub usize);#[derive(Copy, Clone, Ord, PartialOrd, Eq, PartialEq)]pub struct PhysPageNum(pub usize);#[derive(Copy, Clone, Ord, PartialOrd, Eq, PartialEq)]pub struct VirtPageNum(pub usize);
上面分别给出了物理地址、虚拟地址、物理页号、虚拟页号的 Rust 类型声明,它们都是 Rust 的元组式结构体,可以看成 usize 的一种简单包装。我们刻意将它们各自抽象出来而不是都使用 usize 保存,就是为了在 Rust 编译器的帮助下进行 多种方便且安全的 类型转换 (Type Convertion) 。
首先,这些类型本身可以和 usize 之间互相转换,以物理地址 PhysAddr 为例,我们需要:
// os/src/mm/address.rsimpl From<usize> for PhysAddr {fn from(v: usize) -> Self { Self(v) }}impl From<PhysAddr> for usize {fn from(v: PhysAddr) -> Self { v.0 }}
前者允许我们从一个 usize 来生成 PhysAddr ,即 PhysAddr::from(_: usize) 将得到一个 PhysAddr ;反之亦然。其实由于我们在声明结构体的时候将字段公开了出来,从物理地址变量 pa 得到它的 usize 表示的更简便方法 是直接 pa.0 。
注解
Rust 语法卡片:类型转换之 From 和 Into
一般而言,当我们为类型 U 实现了 From<T> Trait 之后,可以使用 U::from(_: T) 来从一个 T 类型的实例来构造一个 U 类型的实例;而当我们为类型 U 实现了 Into<T> Trait 之后,对于一个 U 类型的实例 u ,可以使用 u.into() 来将其转化为一个类型为 T 的实例。
当我们为 U 实现了 From<T> 之后,Rust 会自动为 T 实现 Into<U> Trait, 因为它们两个本来就是在做相同的事情。因此我们只需相互实现 From 就可以相互 From/Into 了。
需要注意的是,当我们使用 From Trait 的 from 方法来构造一个转换后类型的实例的时候,from 的参数 已经指明了转换前的类型,因而 Rust 编译器知道该使用哪个实现;而使用 Into Trait 的 into 方法来将当前 类型转化为另一种类型的时候,它并没有参数,因而函数签名中并没有指出要转化为哪一个类型,则我们必须在其他地方 显式 指出目标类型。比如,当我们要将 u.into() 绑定到一个新变量 t 的时候,必须通过 let t: T 显式声明 t 的类型;又或是将 u.into() 的结果作为参数传给某一个函数,那么这个函数的函数签名中一定指出了传入位置 的参数的类型,Rust 编译器也就明确知道转换的类型。
请注意,解引用 Deref Trait 是 Rust 编译器唯一允许的一种隐式类型转换,而对于其他的类型转换,我们必须手动 调用类型转化方法或者是显式给出转换前后的类型。这体现了 Rust 的类型安全特性,在 C/C++ 中并不是如此,比如两个 不同的整数/浮点数类型进行二元运算的时候,编译器经常要先进行隐式类型转换使两个操作数类型相同,而后再进行运算,导致 了很多数值溢出或精度损失问题。Rust 不会进行这种隐式类型转换,它会在编译期直接报错,提示两个操作数类型不匹配。
其次,地址和页号之间可以相互转换。我们这里仍以物理地址和物理页号之间的转换为例:
|
|
其中 PAGE_SIZE 为 \(4096\) , PAGE_SIZE_BITS 为 \(12\) ,它们均定义在 config 子模块 中,分别表示每个页面的大小和页内偏移的位宽。从物理页号到物理地址的转换只需左移 \(12\) 位即可,但是物理地址需要 保证它与页面大小对齐才能通过右移转换为物理页号。
对于不对齐的情况,物理地址不能通过 From/Into 转换为物理页号,而是需要通过它自己的 floor 或 ceil 方法来 进行下取整或上取整的转换。
// os/src/mm/address.rsimpl PhysAddr {pub fn floor(&self) -> PhysPageNum { PhysPageNum(self.0 / PAGE_SIZE) }pub fn ceil(&self) -> PhysPageNum { PhysPageNum((self.0 + PAGE_SIZE - 1) / PAGE_SIZE) }}
我们暂时先介绍这两种最简单的类型转换。
页表项的数据结构抽象与类型定义
第一小节中我们提到,在页表中以虚拟页号作为索引不仅能够查到物理页号,还能查到一组保护位,它控制了应用对地址空间每个 虚拟页面的访问权限。但实际上还有更多的标志位,物理页号和全部的标志位以某种固定的格式保存在一个结构体中,它被称为 页表项 (PTE, Page Table Entry) ,是利用虚拟页号在页表中查到的结果。
上图为 SV39 分页模式下的页表项,其中 \([53:10]\) 这 \(44\) 位是物理页号,最低的 \(8\) 位 \([7:0]\) 则是标志位,它们的含义如下(请注意,为方便说明,下文我们用 页表项的对应虚拟页面 来表示索引到 一个页表项的虚拟页号对应的虚拟页面):
仅当 V(Valid) 位为 1 时,页表项才是合法的;
R/W/X 分别控制索引到这个页表项的对应虚拟页面是否允许读/写/取指;
U 控制索引到这个页表项的对应虚拟页面是否在 CPU 处于 U 特权级的情况下是否被允许访问;
G 我们暂且不理会;
A(Accessed) 记录自从页表项上的这一位被清零之后,页表项的对应虚拟页面是否被访问过;
D(Dirty) 则记录自从页表项上的这一位被清零之后,页表项的对应虚拟页表是否被修改过。
让我们先来实现页表项中的标志位 PTEFlags :
// os/src/main.rs#[macro_use]extern crate bitflags;// os/src/mm/page_table.rsuse bitflags::*;bitflags! {pub struct PTEFlags: u8 {const V = 1 << 0;const R = 1 << 1;const W = 1 << 2;const X = 1 << 3;const U = 1 << 4;const G = 1 << 5;const A = 1 << 6;const D = 1 << 7;}}
bitflags 是一个 Rust 中常用来比特标志位的 crate 。它提供了 一个 bitflags! 宏,如上面的代码段所展示的那样,可以将一个 u8 封装成一个标志位的集合类型,支持一些常见的集合 运算。它的一些使用细节这里不展开,请读者自行参考它的官方文档。注意,在使用之前我们需要引入该 crate 的依赖:
# os/Cargo.toml[dependencies]bitflags = "1.2.1"
接下来我们实现页表项 PageTableEntry :
|
|
第 3 行我们让编译器自动为
PageTableEntry实现Copy/CloneTrait,来让这个类型以值语义赋值/传参的时候 不会发生所有权转移,而是拷贝一份新的副本。从这一点来说PageTableEntry就和 usize 一样,因为它也只是后者的 一层简单包装,解释了 usize 各个比特段的含义。第 10 行使得我们可以从一个物理页号
PhysPageNum和一个页表项标志位PTEFlags生成一个页表项PageTableEntry实例;而第 20 行和第 23 行则分别可以从一个页表项将它们两个取出。第 15 行中,我们也可以通过
empty方法生成一个全零的页表项,注意这隐含着该页表项的 V 标志位为 0 , 因此它是不合法的。
后面我们还为 PageTableEntry 实现了一些辅助函数(Helper Function),可以快速判断一个页表项的 V/R/W/X 标志位是否为 1,以 V 标志位的判断为例:
// os/src/mm/page_table.rsimpl PageTableEntry {pub fn is_valid(&self) -> bool {(self.flags() & PTEFlags::V) != PTEFlags::empty()}}
这里相当于判断两个集合的交集是否为空集,部分说明了 bitflags crate 的使用方法。
多级页表原理
页表的一种最简单的实现是线性表,也就是按照地址从低到高、输入的虚拟页号从 \(0\) 开始递增的顺序依次在内存中 (我们之前提到过页表的容量过大无法保存在 CPU 中)放置每个虚拟页号对应的页表项。由于每个页表项的大小是 \(8\) 字节,我们只要知道第一个页表项(对应虚拟页号 \(0\) )被放在的物理地址 \(\text{base_addr}\) ,就能 直接计算出每个输入的虚拟页号对应的页表项所在的位置。如下图所示:
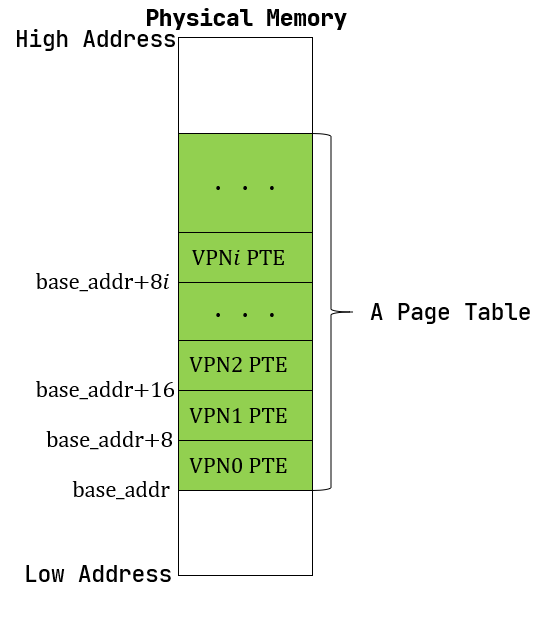
事实上,对于虚拟页号 \(i\) ,如果页表(每个应用都有一个页表,这里指其中某一个)的起始地址为 \(\text{base_addr}\) ,则这个虚拟页号对应的页表项可以在物理地址 \(\text{base_addr}+8i\) 处找到。 这使得 MMU 的实现和内核的软件控制都变得非常简单。然而遗憾的是,这远远超出了我们的物理内存限制。由于虚拟页号有 \(2^{27}\) 种,每个虚拟页号对应一个 \(8\) 字节的页表项,则每个页表都需要消耗掉 \(1\text{GiB}\) 内存!应用的数据还需要保存在内存的其他位置,这就使得每个应用要吃掉 \(1\text{GiB}\) 以上的内存。作为对比, 我们的 K210 开发板目前只有 \(8\text{MiB}\) 的内存,因此从空间占用角度来说,这种线性表实现是完全不可行的。
线性表的问题在于:它保存了所有虚拟页号对应的页表项,但是高达 \(512\text{GiB}\) 的地址空间中真正会被应用 使用到的只是其中极小的一个子集(本教程中的应用内存使用量约在数十~数百 \(\text{KiB}\) 量级),也就导致 有意义并能在页表中查到实际的物理页号的虚拟页号在 \(2^{27}\) 中也只是很小的一部分。由此线性表的绝大部分空间 其实都是被浪费掉的。
那么如何进行优化呢?核心思想就在于 按需分配 ,也就是说:有多少合法的虚拟页号,我们就维护一个多大的映射,并为此使用 多大的内存用来保存映射。这是因为,每个应用的地址空间最开始都是空的,或者说所有的虚拟页号均不合法,那么这样的页表 自然不需要占用任何内存, MMU 在地址转换的时候无需关心页表的内容而是将所有的虚拟页号均判为不合法即可。而在后面, 内核已经决定好了一个应用的各逻辑段存放位置之后,它就需要负责从零开始以虚拟页面为单位来让该应用的地址空间的某些部分 变得合法,反映在该应用的页表上也就是一对对映射顺次被插入进来,自然页表所占据的内存大小也就逐渐增加。
这种思想在计算机科学中得到了广泛应用:为了方便接下来的说明,我们可以举一道数据结构的题目作为例子。设想我们要维护 一个字符串的多重集,集合中所有的字符串的字符集均为 \(\alpha=\{a,b,c\}\) ,长度均为一个给定的常数 \(n\) 。该字符串集合一开始为空集。我们要支持两种操作,第一种是将一个字符串插入集合,第二种是查询一个字符串在当前 的集合中出现了多少次。
简单起见,假设 \(n=3\) 。那么我们可能会建立这样一颗 字典树 (Trie) :
字典树由若干个节点(图中用椭圆形来表示)组成,从逻辑上而言每个节点代表一个可能的字符串前缀。每个节点的存储内容 都只有三个指针,对于蓝色的非叶节点来说,它的三个指针各自指向一个子节点;而对于绿色的叶子节点来说,它的三个指针不再指向 任何节点,而是具体保存一种可能的长度为 \(n\) 的字符串的计数。这样,对于题目要求的两种操作,我们只需根据输入的 字符串中的每个字符在字典树上自上而下对应走出一步,最终就能够找到字典树中维护的它的计数。之后我们可以将其直接返回或者 加一。
注意到如果某些字符串自始至终没有被插入,那么一些节点没有存在的必要。反过来说一些节点是由于我们插入了一个以它对应的字符串 为前缀的字符串才被分配出来的。如下图所示:
一开始仅存在一个根节点。在我们插入字符串 acb 的过程中,我们只需要分配 a 和 ac 两个节点。 注意 ac 是一个叶节点,它的 b 指针不再指向另外一个节点而是保存字符串 acb 的计数。 此时我们无法访问到其他未分配的节点,如根节点的 b/c 或是 a 节点的 a/b 均为空指针。 如果后续再插入一个字符串,那么 至多分配两个新节点 ,因为如果走的路径上有节点已经存在,就无需重复分配了。 这可以说明,字典树中节点的数目(或者说字典树消耗的内存)是随着插入字符串的数目逐渐线性增加的。
读者可能很好奇,为何在这里要用相当一部分篇幅来介绍字典树呢?事实上 SV39 分页机制等价于一颗字典树。 \(27\) 位的 虚拟页号可以看成一个长度 \(n=3\) 的字符串,字符集为 \(\alpha=\{0,1,2,…,511\}\) ,因为每一位字符都 由 \(9\) 个比特组成。而我们也不再维护所谓字符串的计数,而是要找到字符串(虚拟页号)对应的页表项。 因此,每个叶节点都需要保存 \(512\) 个 \(8\) 字节的页表项,一共正好 \(4\text{KiB}\) , 可以直接放在一个物理页帧内。而对于非叶节点来说,从功能上它只需要保存 \(512\) 个指向下级节点的指针即可, 不过我们就像叶节点那样也保存 \(512\) 个页表项,这样所有的节点都可以被放在一个物理页帧内,它们的位置可以用一个 物理页号来代替。当想从一个非叶节点向下走时,只需找到当前字符对应的页表项的物理页号字段,它就指向了下一级节点的位置, 这样非叶节点中转的功能也就实现了。每个节点的内部是一个线性表,也就是将这个节点起始物理地址加上字符对应的偏移量就找到了 指向下一级节点的页表项(对于非叶节点)或是能够直接用来地址转换的页表项(对于叶节点)。
这种页表实现被称为 多级页表 (Multi-Level Page-Table) 。由于 SV39 中虚拟页号被分为三级 页索引 (Page Index) ,因此这是一种三级页表。
非叶节点的页表项标志位含义和叶节点相比有一些不同:
当 V 为 0 的时候,代表当前指针是一个空指针,无法走向下一级节点,即该页表项对应的虚拟地址范围是无效的;
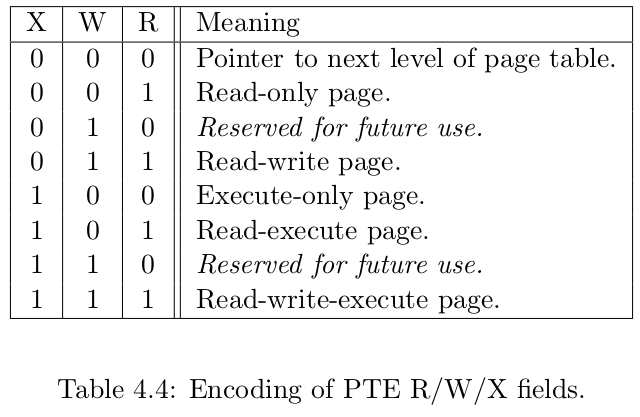
只有当V 为1 且 R/W/X 均为 0 时,表示是一个合法的页目录表项,其包含的指针会指向下一级的页表。
注意: 当V 为1 且 R/W/X 不全为 0 时,表示是一个合法的页表项,其包含了虚地址对应的物理页号。
在这里我们给出 SV39 中的 R/W/X 组合的含义:
注解
大页 (Huge Page)
本教程中并没有用到大页的知识,这里只是作为拓展,不感兴趣的读者可以跳过。
事实上正确的说法应该是:只要 R/W/X 不全为 0 就会停下来,直接从当前的页表项中取出物理页号进行最终的地址转换。 如果这一过程并没有发生在多级页表的最深层,那么在地址转换的时候并不是直接将物理页号和虚拟地址中的页内偏移接 在一起得到物理地址,这样做会有问题:由于有若干级页索引并没有被使用到,即使两个虚拟地址的这些级页索引不同, 还是会最终得到一个相同的物理地址,导致冲突。
我们需要重新理解将物理页号和页内偏移“接起来”这一行为,它的本质是将物理页号对应的物理页帧的起始物理地址和 页内偏移进行求和,前者是将物理页号左移上页内偏移的位数得到,因此看上去恰好就是将物理页号和页内偏移接在一起。 但是如果在从多级页表往下走的中途停止,未用到的页索引会和虚拟地址的 \(12\) 位页内偏移一起形成一个 位数更多的页内偏移,也就对应于一个大页,在转换物理地址的时候,其算法仍是上述二者求和,但那时便不再是简单的 拼接操作。
在 SV39 中,如果使用了一级页索引就停下来,则它可以涵盖虚拟页号的前 \(9\) 位为某一固定值的所有虚拟地址, 对应于一个 \(1\text{GiB}\) 的大页;如果使用了二级页索引就停下来,则它可以涵盖虚拟页号的前 \(18\) 位为某一固定值的所有虚拟地址,对应于一个 \(2\text{MiB}\) 的大页。以同样的视角,如果使用了 所有三级页索引才停下来,它可以涵盖虚拟页号为某一个固定值的所有虚拟地址,自然也就对应于一个大小为 \(4\text{KiB}\) 的虚拟页面。
使用大页的优点在于,当地址空间的大块连续区域的访问权限均相同的时候,可以直接映射一个大页,从时间上避免了大量 页表项的索引和修改,从空间上降低了所需节点的数目。但是,从内存分配算法的角度,这需要内核支持从物理内存上分配 三种不同大小的连续区域( \(4\text{KiB}\) 或是另外两种大页),便不能使用更为简单的插槽式管理。权衡利弊 之后,本书全程只会以 \(4\text{KiB}\) 为单位进行页表映射而不会使用大页特性。
那么 SV39 多级页表相比线性表到底能节省多少内存呢?这里直接给出结论:设某个应用地址空间实际用到的区域总大小为 \(S\) 字节,则地址空间对应的多级页表消耗内存为 \(\frac{S}{512}\) 左右。下面给出了详细分析,对此 不感兴趣的读者可以直接跳过。
注解
分析 SV39 多级页表的内存占用
我们知道,多级页表的总内存消耗取决于节点的数目,每个节点 则需要一个大小为 \(4\text{KiB}\) 物理页帧存放。不妨设某个应用地址空间中的实际用到的总空间大小为 \(S\) 字节,则多级页表所需的内存至少有这样两个上界:
每映射一个 \(4\text{KiB}\) 的虚拟页面,最多需要新分配两个物理页帧来保存新的节点,加上初始就有一个根节点, 因此消耗内存不超过 \(4\text{KiB}\times(1+2\frac{S}{4\text{KiB}})=4\text{KiB}+2S\) ;
考虑已经映射了很多虚拟页面,使得根节点的 \(512\) 个孩子节点都已经被分配的情况,此时最坏的情况是每次映射 都需要分配一个不同的最深层节点,加上根节点的所有孩子节点并不一定都被分配,从这个角度来讲消耗内存不超过 \(4\text{KiB}\times(1+512+\frac{S}{4\text{KiB}})=4\text{KiB}+2\text{MiB}+S\) 。
虽然这两个上限都可以通过刻意构造一种地址空间的使用来达到,但是它们看起来很不合理,因为它们均大于 \(S\) ,也就是 元数据比数据还大。其实,真实环境中一般不会有如此极端的使用方式,更加贴近 实际的是下面一种上限:即除了根节点的一个物理页帧之外,地址空间中的每个实际用到的大小为 \(T\) 字节的 连续 区间 会让多级页表额外消耗不超过 \(4\text{KiB}\times(\lceil\frac{T}{2\text{MiB}}\rceil+\lceil\frac{T}{1\text{GiB}}\rceil)\) 的内存。这是因为,括号中的两项分别对应为了映射这段连续区间所需要新分配的最深层和次深层节点的数目,前者每连续映射 \(2\text{MiB}\) 才会新分配一个,而后者每连续映射 \(1\text{GiB}\) 才会新分配一个。由于后者远小于前者, 可以将后者忽略,最后得到的结果近似于 \(\frac{T}{512}\) 。而一般情况下我们对于地址空间的使用方法都是在其中 放置少数几个连续的逻辑段,因此当一个地址空间实际使用的区域大小总和为 \(S\) 字节的时候,我们可以认为为此多级页表 消耗的内存在 \(\frac{S}{512}\) 左右。相比线性表固定消耗 \(1\text{GiB}\) 的内存,这已经相当可以 接受了。
上面主要是对一个固定应用的多级页表进行了介绍。在一个多任务系统中,可能同时存在多个任务处于运行/就绪状态,它们的多级页表 在内存中共存,那么 MMU 应该如何知道当前做地址转换的时候要查哪一个页表呢?回到 satp CSR 的布局 , 其中的 PPN 字段指的就是多级页表根节点所在的物理页号。因此,每个应用的地址空间就可以用包含了它多级页表根节点所在物理页号 的 satp CSR 代表。在我们切换任务的时候, satp 也必须被同时切换。
最后的最后,我们给出 SV39 地址转换的全过程图示来结束多级页表原理的介绍: